Trivial 3D data
Projection:
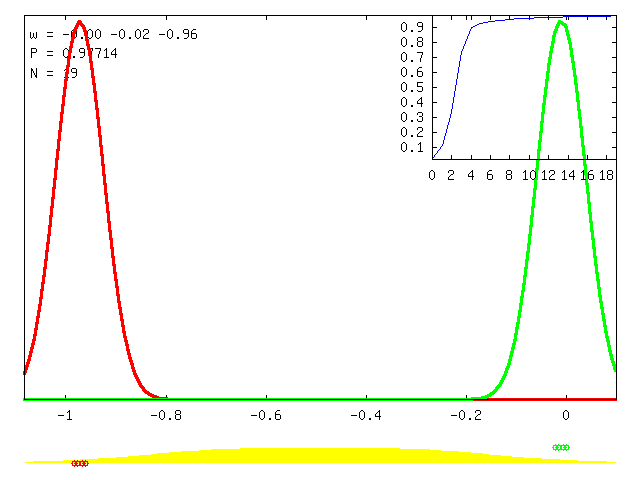
Last frame:
Octave output:
Initialization 5 of 5
vectors = 8
features = 3
lrate = 0.100000
eps = 0.001000
nmax = 100
func = f_x4
beta = 50.000000
ninit = 5.000000
N PPIndex weights
0 0.0260 -0.1020 -0.2007 -0.1139
1 0.1150 -0.0847 -0.1740 -0.1919
2 0.3327 -0.0709 -0.1624 -0.3210
3 0.7334 -0.0460 -0.1207 -0.5139
4 0.9024 -0.0158 -0.0473 -0.6601
5 0.9275 -0.0123 -0.0375 -0.7138
6 0.9405 -0.0105 -0.0323 -0.7517
7 0.9488 -0.0093 -0.0289 -0.7815
8 0.9546 -0.0085 -0.0264 -0.8065
9 0.9590 -0.0078 -0.0245 -0.8280
10 0.9625 -0.0073 -0.0230 -0.8470
11 0.9653 -0.0069 -0.0217 -0.8641
12 0.9676 -0.0065 -0.0206 -0.8797
13 0.9696 -0.0062 -0.0197 -0.8940
14 0.9712 -0.0059 -0.0189 -0.9072
15 0.9727 -0.0057 -0.0182 -0.9195
16 0.9740 -0.0055 -0.0175 -0.9311
17 0.9752 -0.0053 -0.0169 -0.9419
18 0.9762 -0.0051 -0.0164 -0.9522
19 0.9771 -0.0050 -0.0160 -0.9620
---------------------------------------------